








航迹规划已经成为无人驾驶飞行器(UAVs)的一个热点问题,特别是在复杂的室内环境中,现有无人机室内航迹规划解决方案因其计算复杂度高、收敛速度慢和飞行航迹差而受到很大限制。此外,由于室内障碍物密度更高,无人机在室内航迹规划过程中经常会陷入局部死区,导致算法死锁,无法获得飞行航迹。
近期,北京大学澳门十大赌厅网程承旗、曲腾腾课题组基于地球立体剖分网格GeoSOT-3D理论,建立起一套网格优化的无人机室内航迹规划算法集。该研究成果以“Grid-optimized UAV Indoor Path Planning Algorithms in a Complex Environment”(https://doi.org/10.1016/j.jag.2022.102857)为题于2022年6月9日在中科院1区TOP期刊International Journal of Applied Earth Observation and Geoinformation在线发表。
该研究提出了一套针对室内复杂环境、通过网格优化的无人机航迹规划算法框架(图1),主要包含三个网格优化的核心算法:
图1. 网格优化的无人机室内路径规划算法框架图
网格优化的室内空域建模(GO-IAM)算法。基于GeoSOT-3D地球立体剖分网格模型,建立起一个增强的室内多层级三维网格空域模型,大大降低空域计算复杂性。
网格优化的A*航迹规划(GO-APP)算法。以常规室内场景为重点,GO-APP通过采用改进的A*网格算法,增加无人机的飞行约束与代价限制,可快速有效完成建筑物内的航迹规划(图2)。
图2. 多旋翼无人机路径规划结果。(a) 障碍物特殊放置下的路径规划。(b) 障碍物随机放置下的路径规划
网格优化的局部回溯航迹规划(GO-LBPP)算法。为了解决“死区问题”,GO-LBPP采用局部回溯策略,并改变无人机的视界,在多障碍物的室内场景中实现了有效精确的无人机航迹规划(图3)。
图3. 局部回溯算法成功跳出室内环境中的局部死区。(a) 使用普通路径规划算法造成的死区。(b) 使用GO-LBPP算法的航迹规划结果
在多个无人机室内航迹规划算法的对比实验中,该研究将GO-APP算法与常用的模拟退火、Q-learning、人工势场、遗传算法、粒子群、蚁群等局部/全局规划算法的规划结果进行对比显示,GO-APP算法的航迹规划时间和规划航迹路线长度最短(表1),规划路径更优、可飞行性更高(图3)。而在多障碍物室内环境中采用GO-LBPP算法,则可以顺利解决室内局部死区问题,避免规划航迹的死锁,这是现有其他算法均无法实现的。未来这项工作将继续深入,将算法集与多机协同策略相结合,有望在无人集群协同规划中取得更多进展。
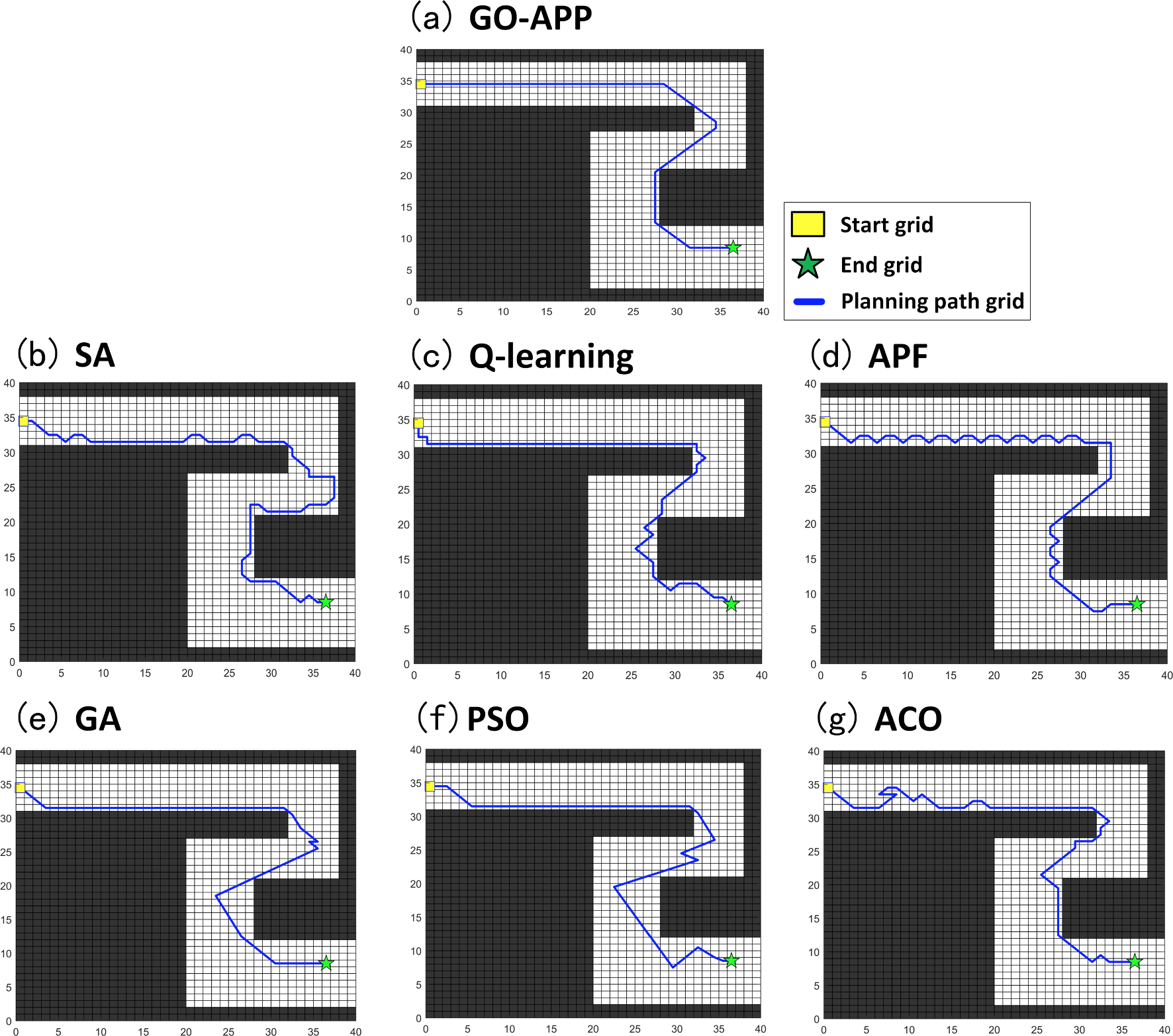
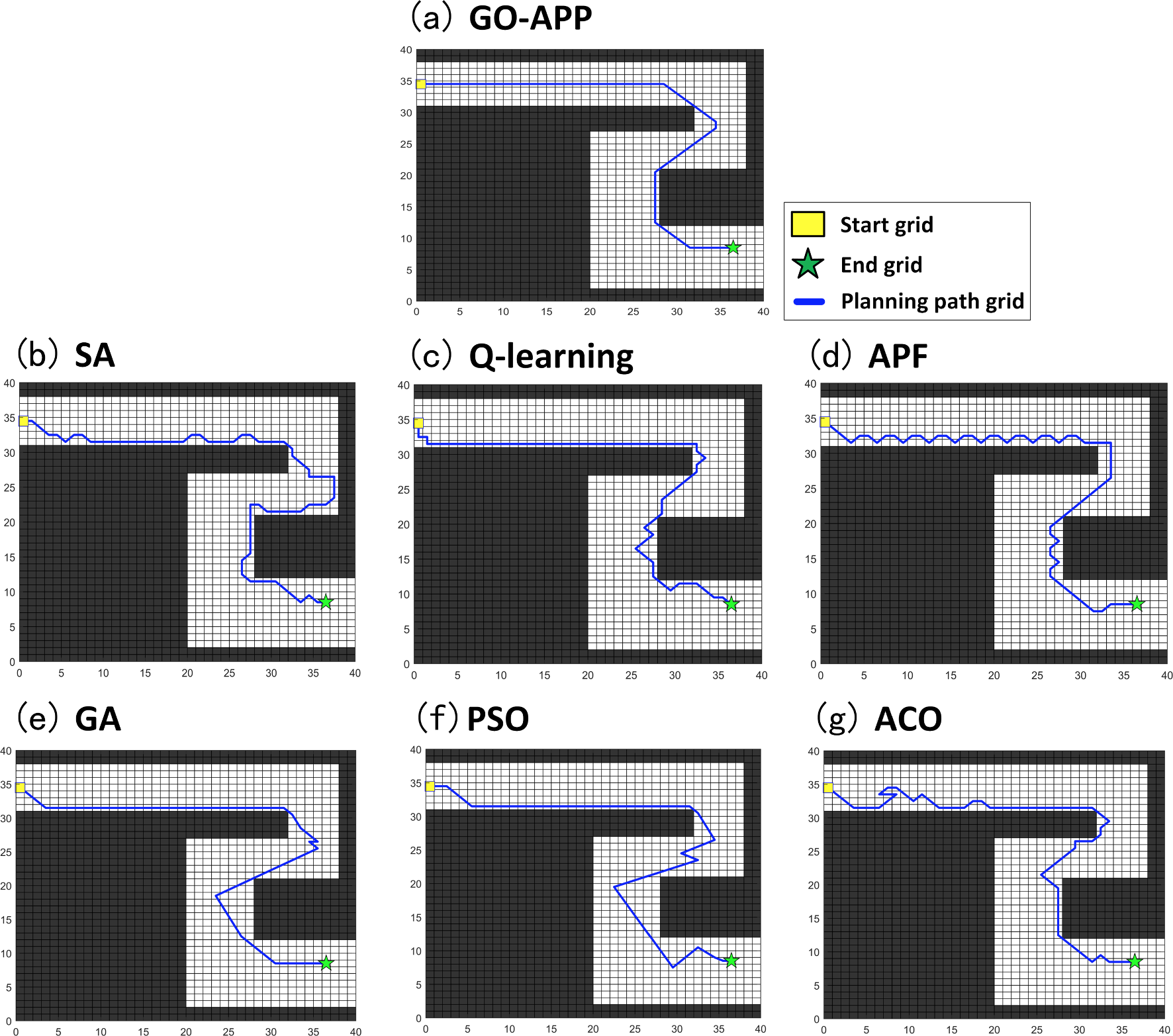
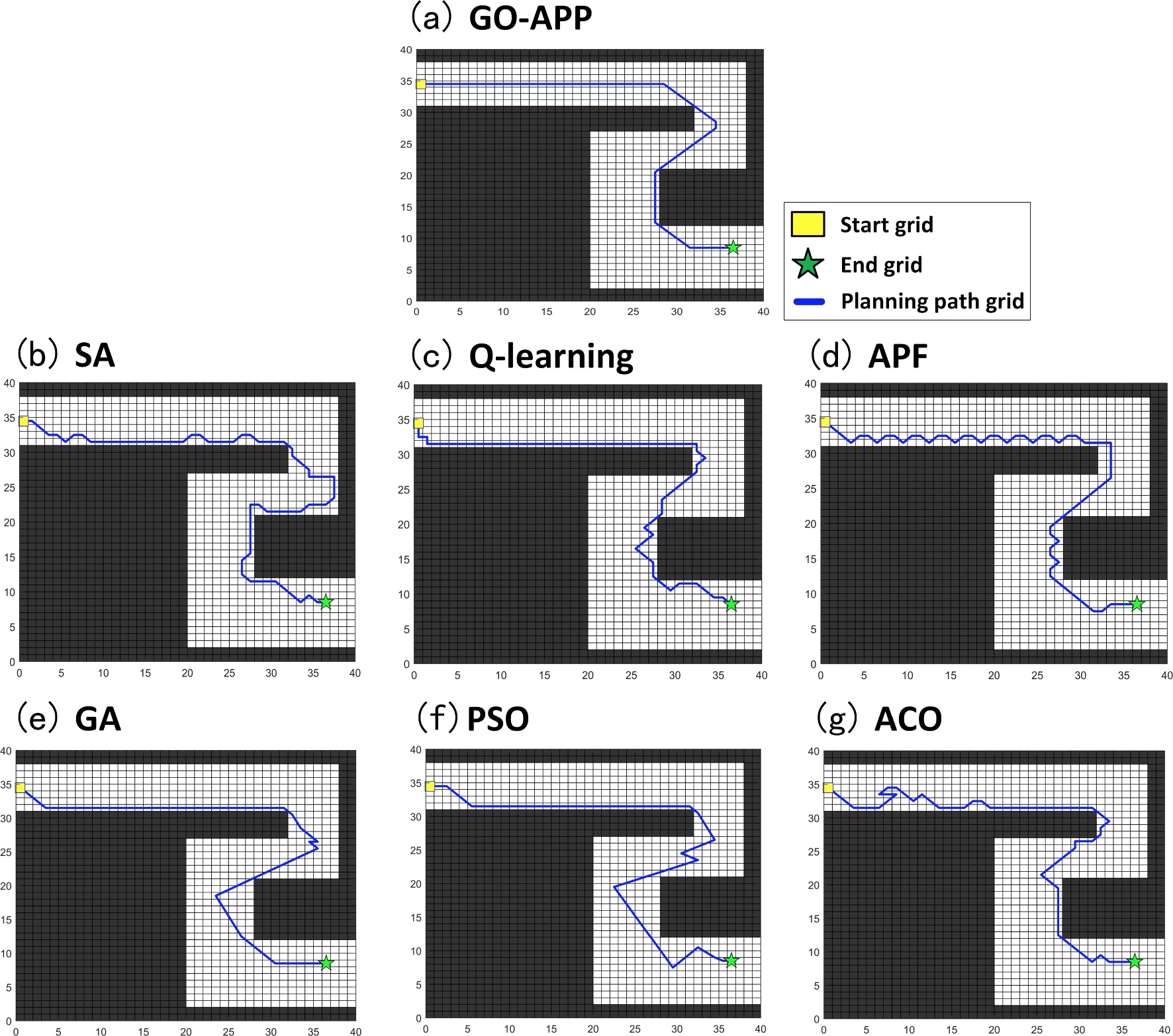
图4. 二维室内环境中不同无人机路径规划算法的规划路径图比较

表1. 二维室内环境中不同无人机路径规划算法的结果比较
北京大学前沿交叉学科研究院博士生韩炳是论文第一作者,北京大学澳门十大赌厅网曲腾腾助理研究员是论文通讯作者,北京大学澳门十大赌厅网程承旗教授是论文合作作者。上述研究得到了国家重点研发计划、国防基础加强重点项目及国家自然科学基金等资助。
